やりました!
もしあなたが駐車場に車を走らせることが出来たらと想像してみてください。車が空きスペースを見つけて、準備ができたら、車を呼んで迎えに来てもらうのです。バレットパーキングのように、本当のバレーパーキングを除いて、あなたが運転するときには常にあなたと一緒にいます。
2年以上前、パーコペディア、サリー大学、コネクティッドプレースカタパルトは、自律走行車はどのように駐車するのだろうかという疑問に答えることに着手しました。これが難しい問題であることはわかっていました。立体駐車場や地下駐車場に駐車するということは、衛星の見通しがないということであり、GPSがないということになります。つまり、カメラや慣性計測装置、車輪オドメトリなどの車載センサーを使って、車両がどこにいるかを推定する必要があるということです。環境の点群があればLiDARを使って位置を特定できることはわかっていますが、将来的にすべての車両にLiDARが搭載されるとは考えられません。そこで私たちは、視覚慣性の自己位置測定に焦点を当てることにしました。
私たちの目標は、自動運転車をサポートするためにどのような地図が必要かを調べ、これらの地図を最適に活用する自己位置測定とナビゲーションアルゴリズムを開発し、自動運転車での自動駐車を実証することでした。また、自律走行が安全に行われるようにする必要がありました。最後に私たちは一般の人々が駐車場そのものについてどのように考えているのかを調べたいと考えていました。
今年の初め、私たちは現状のアップデートを発表し、ほとんどの作業が完了したことを示しました。あとは、ローカライゼーションとナビゲーションのソフトウェアを自律走行型のテスト車両「StreetDrone」に展開するだけでした。
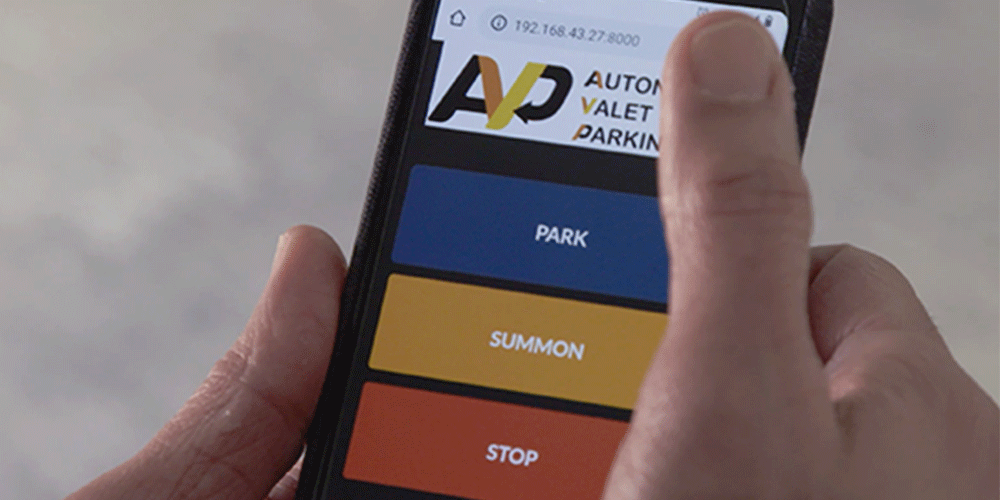
上のビデオでは、ドライバーが「PARK」を押すと、ソフトウェアがドロップオフゾーンから選択したターゲット駐車スペースまでのルートを計画しています。車両はGPS信号なしで駐車場内の現在位置を見つけることができます。最後にソフトウェアは、召喚されたときにピックアップゾーンに戻る経路を計画します。
今回のデモンストレーションにより、AVPプロジェクトのすべての成果物を完成させ、時間と予算の両方でプロジェクトを成功裏に完了させることができました。感謝の意を表します。
このプロジェクトを通して、ドライバーが自分で駐車してくれる車の利便性を重視していることを知りました。このプロジェクトでは、技術的な実証機の開発を通じて、AVPの完全な普及に向けた障害を特定し、それを克服することで、大きなブレークスルーをもたらしました。今後数年のうちに、あなたの車が自分で駐車できるようになり、何百万人ものドライバーが毎日遭遇する平凡でストレスの多い経験を変えることができるようになるでしょう。