我们做到了!
试想一下,当您开车驶入停车场,接下来您的爱车自己去寻找车位,而不是由您花20分钟的时间驾着车在停车场内寻找停车位。汽车将自动找到可用停车位停妥,并在您召唤时,及时来接您。这有点像代客泊车,但又不是,因为驾驶座上没有代泊员。
两年多以前,泊知港与萨里大学、Connected Places Catapult着手解决一个问题——自动驾驶汽车将如何停车?这是一个困难的问题。在多层或地下停车场中停车意味着接收不到卫星信号,这意味着没有GPS。车辆只能依靠车载传感器(例如摄像机,惯性测量单元和轮速传感器)来估计其在哪里。我们知道,在拥有停车场点云数据的条件下,可以依靠激光雷达来进行定位,但是我们不能假定将来所有车辆都将配备激光雷达。因此,我们选择专注于视觉-惯性定位。
我们的目标是制作支持自动驾驶汽车所需的地图,并开发最能利用这些地图的定位和导航算法,同时在我们的测试车上安全实现自动代客泊车的演示。最后,我们想了解公众对停车的看法。
上半年,我们发布了项目的最新状态,表明大多数工作已经完成。剩余工作就是将本地化设定和导航软件部署到我们的自动测试车辆StreetDrone上。
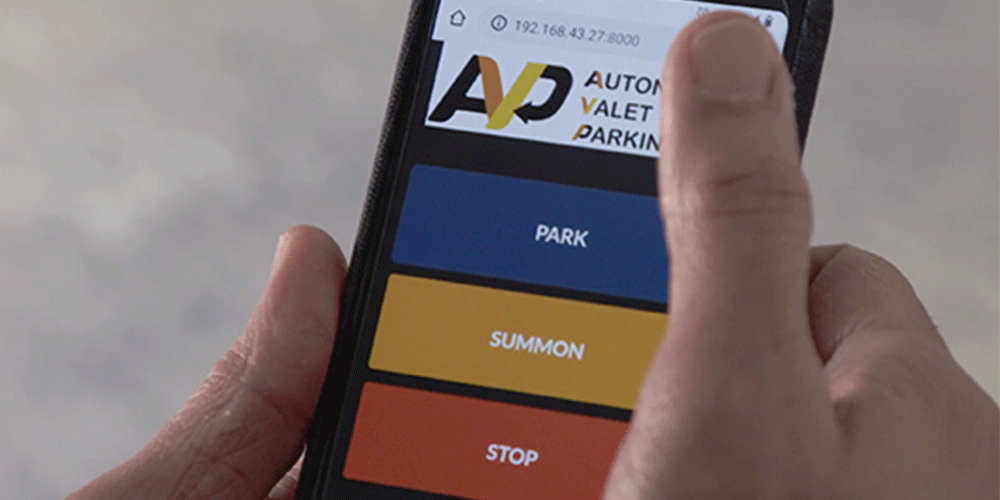
在上面的视频中,当驾驶员按下“PARK”时,软件会规划从下客区到所选目标停车位的路线。车辆能够在没有GPS信号的情况下定位其在停车场的当前位置。最后,当车辆被召唤时,软件会规划一条返回接客区的路径。
本次演示后,我们很高兴地宣布,我们已在规定时间和预算内完成了自动代客泊车项目的所有交付。在此我们再次感谢:
- 创新英国和互联自动驾驶中心,为该项目提供了资金
- Admiral在此项目期间为自动驾驶车辆StreetDrone提供了保险
- 国家停车场允许我们在伦敦桥停车场进行测试
最后,我们了解到,驾驶员认为车辆的自动停车所带来的便捷性是有价值的。通过开发技术演示程序,确定并克服全面部署AVP的障碍,该项目取得了重大突破。 在接下来的几年中,您的汽车将能够自行停车,这将改变数百万人每天在停车方面遇到的烦人体验。泊知港非常自豪,能为实现这一目标发挥关键作用。