
 进入新的十年,可以肯定地说,“实时数据”已成为21世纪前二十年的一个关键词。毫无疑问,在交通信息方面,实时数据已被证明具有极为重要的价值,它可以为驾驶员提供实时路况信息,让他们能够及时调整行车路线,避开交通拥堵路段。
进入新的十年,可以肯定地说,“实时数据”已成为21世纪前二十年的一个关键词。毫无疑问,在交通信息方面,实时数据已被证明具有极为重要的价值,它可以为驾驶员提供实时路况信息,让他们能够及时调整行车路线,避开交通拥堵路段。
但是否单纯依赖实时数据而不考虑其它数据来源就是最佳的方案?
在停车领域,街边实时停车余位数据的主要来源之一是传感器(电磁或红外线传感器),传感器安装在停车位的中间位置,用于检测该停车位上是否停有车辆。但是,如果一组5个的传感器中刚好有1个发生故障,那么,由于数据是这5个空间信息的聚合而形成,所以所有5个数据都将不准确。此外,在街道环境中安装和维护传感器的高昂成本也让其难以实施。在英国,威斯敏斯特市议会已经取消了他们备受好评的智慧停车街道传感器计划,不过目前还不清楚是因为维护成本太高还是其它原因。
所以,“实时”真的是实时吗?事实上,从源系统向云端报告空余车位,到该数据传输至一个数字停车服务提供商(比如泊知港),再到该数据导入附近正在搜索停车位的联网汽车的车载系统,这个过程中至少有1分钟的延迟。与室内停车不同,街边停车位不可能预定,所以当驾驶员到达报告的空余车位时,该停车位很有可能已经被别人占用了。
那么,获得停车场余位数据还可以有哪些来源呢?
- 一个来源是汽车传感器数据。虽然这些数据通常被认为是准确的,但互联车辆数据和基于基础设施的传感器数据都存在同样的延时问题,另外许多数据还受到GPS误差的影响。在城市环境(有停车压力的地方)停车时,GPS定位通常精确到1-2米。随着城市里的高楼大厦越来越多,GPS卫星的视线越来越差,这意味着数据的准确性越来越低、误差越来越大。在一个城市中,如果误差达数十米,将导致汽车传感器数据报告的停车位置出现在不同的路段或相邻道路上。在与一些整车厂合作进行的测试中,我们发现,车辆已经明显“偏离道路”并在穿过建筑物!
- 另一个来源是交易数据。但是,如果把它当作唯一数据来源的话,也存在缺陷。许多城市安装有覆盖多条街道的电子计费系统,导致你无法辨别事实上哪条街上已经停满车辆,因此也就不知道哪条街道上有空余车位。即使系统能够识别个别车位,报告的数据往往也不完全正确,因为驾驶员可能由于实际停车时间的计算错误导致另一个可用停车位没有被报告而多付费,或是由于超过预先支付的停车时间并且继续占用停车而少付费。并且,交易数据也不考虑持有免费停车许可证的人士(例如,住户或残疾证持有人),他们可以免费停车,但仍可能占用付费停车位。交易数据也不涵盖免费停车时段。
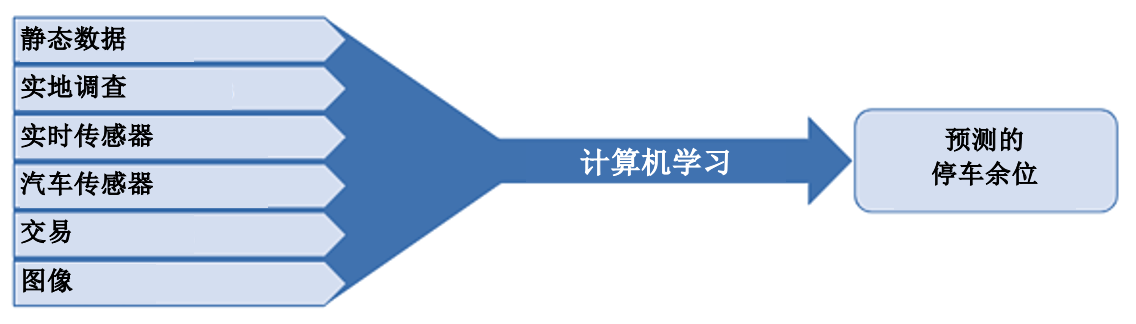
泊知港整合多个数据源——静态停车数据、实地调查、实时停车传感器、汽车传感器、交易和图像,以避免潜在可能的错误或差距,并结合计算机模型,提供停车余位预测服务。
结合历史行为模式和实时数据,所有预测都能够考虑到改变正常行为并可能影响停车位余量的事件(例如,足球比赛、节日等)。
这就是泊知港为B2B客户提供的行业领先解决方案,客户可以放心地将该解决方案提供给驾驶员。泊知港的预测都经过严格测试,因为我们一直在进行实地调查,手动收集和核查所有相关信息,包括全球预测模型的准确性。
交易数据对预测模型有重要的影响作用。据测试,当我们将交易数据纳入预测模型时,其准确性提高了2倍甚至更多。
欲进一步了解我们的概率预测,或深入了解概率理论和布莱尔分数,请与我们联系!